




ロビン・マーフィー博士
日本で発生した地震、津波、福島第一原子力発電所の事故という3重の大災害でレスキューロボットを活用した話をすると、多くの人は次の2つの点で大変驚く。第一に、レスキューロボットが非常に新しく、難しい分野であるため、東日本大震災以前に災害で活用された事例がわずか25件に過ぎないこと。第二に、ロボット活用に向け、米国と日本が科学者、産業界、大使館、防衛関連部局など全てのレベルで協力したことである。
レスキューロボット工学は、阪神・淡路大震災とオクラホマ連邦政府ビル爆破事件という、共に1995年に起きた悲惨な出来事を受け、日米の研究者が創設した分野である。この2つの惨事が起きたのは、次第にロボットの移動が可能になって、もはや工場の床に固定しなくなっていた頃であった。いずれこの移動ロボットを、救助隊が肉眼で確認できないがれきの奥深くへ進入したり、道を塞ぐ巨大ながれきの塊をすぐに持ちあげるために活用できるようになることは明らかだった。
ロボットを所有しているレスキュー・チームはかなり限られているものの、日米の基礎研究者たちは、個別に、あるいは協力して、積極的にレスキューロボット工学の研究を行っている。東北大学の田所諭博士と私は1998年から協力関係を続けている。田所博士が日本に国際レスキューシステム研究機構(IRS)を設立したのは、ロボット支援探索救助センター(CRASAR)が米国に設立された直後の2002年だった。

ディザスターシティでのクインスの試験(写真提供 Robin Murphy)
東日本大震災が発生した時、私たちはテキサスA&M大学のディザスターシティ訓練施設で、IRSと共に実施したさまざまながれきの山やトンネルでのクインス(Quince)の移動性向上試験に成功し、実り多い1週間を終えたところだった(この移動性の向上は後に福島で役立つことになる)。翌朝の出発を控え、最後に近くの農場で皆で乗馬を楽しみ、祝賀会を催した。その夜、午前3時に電話がかかってきて私は目を覚ましたが、取り損なったので電話は切れてしまった。それは田所博士からの電話だった。電話をかけ直したが、通話中だったので、田所博士が私に間違って電話をかけてしまったのだろうと考えた。午前5時30分に起床して、地震警報を見過ごしていたことに気づいたので、急いでノートパソコンに向かい、震災の発生を知ったのである。
震災の報道映像や、チャーリー、アイク、カトリーナ、ウィルマといったハリケーンの際にさまざまなロボットを活用した経験から、地上ロボットは必要ないと考えた。必要性が高いのは、濁った水中の状況を把握できる音波探知機を搭載したロボット・ボートや潜水ロボットなどの海洋ロボットであった。海洋ロボットが救命に役立つ可能性は低いが、経済復興には役立つ。橋、港および護岸の水中部分の状況を判断し、航路や港にがれきがないか、マリーナや工場から燃料や危険物質の漏出がないかなどを確認できる。
無人艇にはケーブルにつないで操作する遠隔操作無人探査機(ROV)、自律型無人潜水機(AUV)と呼ばれる、事前プログラムに従って航行する魚雷のようなロボット、そして無線インターネットで操作する無人水上艇(USV)がある。いずれもさまざまなタイプの音波探知機とビデオカメラを搭載できる。無人艇のほとんどは米国で製造されている。

福島の着陸地点のTホーク(写真提供 東京電力)
私たちが勧めたのはROVであった。陸地から操作でき(探索を行う地域で船が不足していても問題ない)、橋の検査に適しているからである。日本国内にもROVの代理店があるが、一般的に災害救助機関や輸送機関にはROVの性能に関する知識がない。そこで日本へ行きIRSを支援することにより、私たちは人道支援をしながらROVの技術に対する人々の理解を深める一方で、言うまでもないことだが、ロボットに関する科学的なデータも収集できると考えた。
既に日本に戻っていたIRSの関係者は私たちの判断に同意し、東京から東北各県まであらゆるレベルの政府関係者にすぐに働きかけ始め、彼らのニーズを理解するとともに、こうした独創的なロボットの機能について懐疑的であり、代理店との契約を望まない場合にはロボットを無償で提供すると申し入れた。
同時に、CRASARで海洋ロボット分野の研究を主導するエリック・スタイムレ博士は、CRASARが長年にわたり協力関係を築いてきたROVおよびAUVのメーカーに連絡した。1社を除く全社がCRASARの「国境なきロボット学者」の同意書への署名に積極的で、損失または破損した場合の支払いを求めないという条件で、機材と最大10日間の要員時間を提供するとともに、全データを共有することに同意した。輸送費はCRASARが寄付金と研究費で賄うこととした。

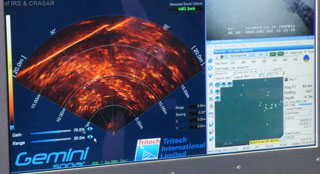
シーボティクス社のサーボットを配置するショーン・ニューサム(写真上)と音波探知機から送られる画像の一例(同下)(Courtesy of IRS & CRASAR)
私は3月28日から4月2日まで東京で、福島第一原発の請負業者のひとつであるウェスティングハウス社のチームに合流し、UAVでの人間とロボットの相互作用についての私のモデルを説明した。ウェスティングハウス社はハネウェル社製のTホーク(T-Hawk)を選んでいた。これは小さなビール樽のような格好をした小型UAVである。ヘリコプターのように飛行するが、回転部が「樽」の中にあり保護されているので、突風が吹いてUAVが壁にぶつかりそうな状況でも建物に接近できるのが利点である。
東京電力から正確なデータは発表されていないものの、ハネウェル社製のTホークは4月から6月までに原発施設内で40回を超える任務を遂行したほか、原発周辺地域での作業でも東京電力および当局を支援した。Tホークのおかげで、原子力技師は、上空の衛星や航空機からでは確認できない角度から、原子炉建屋内をリアルタイムで確認することができた。映像は原子炉建屋の状態や構造上の損傷状況を判断する際に非常に役立ったが、おそらく最も貴重なデータはTホークに据え付けられた放射線センサーから得るデータであった。ロボットが低空や建屋のすぐ横を飛行して集めたデータをまとめて、非常に正確な放射線マップを作成した。Tホークはまた、建屋のひとつから上がる噴煙の中で空中停止し、直接試料を採取した。
私たちは4月17日に成田空港に到着した。八戸港は手作業での除去作業が終わっていたが、八戸市よりも規模が小さい2つの自治体、南三陸町と陸前高田市から正式な出動要請が出ていた。 現地に向かった合同チームは、IRSから松野博士、木村哲也博士、真壁賢一氏(消防士)、2人の大学院生、CRASARからスタイムレ博士、ジェシー・ロードッカー氏、カレン・ドレガー氏、そして私という構成であった。
最初に向かったのは、漁業活動の再開を熱望する南三陸町であった。私たちは2台のROVを使って港を調査した。4時間の水中調査の結果、漁船の進入が安全であると宣言した。これに対し佐藤仁町長から感動的な感謝の言葉をいただいた。ROVが成功した鍵は、数メートル先からでも、濁った水中で細いネットやロープを探知できる映像音波探知機を使用した点にある。いったん探知すると、ROVは対象物に接近し、カメラを使ってそれが何であるかを確認する。水の濁りがひどく、50センチ先が見えないこともあった。
最後の5つの訪問先は陸前高田市内にあった。そこでは2つのことに驚いた。ひとつは私たちに課された任務が、港の調査ではなく行方不明者の捜索であった点である。私たちが不明者を発見することはなかったが、水中にあるハロー・キティのリュックや子どものおもちゃなどが画面に映し出されると、人命が失われたことが思い起こされ、しばしば画面から目をそらさずにはいられなかった。たとえ数家族でも、何かを見つけて気持ちの整理を付けさせてあげたかったが、それができず残念だった。

海上保安庁と協力したIRSとCRASARのチーム(Courtesy of IRS & CRASAR)
もうひとつの驚きは、日本の海上保安庁が自発的に合流し、同庁の潜水士が作業を禁止されている場所を教えてくれたことである。例えば、海に浮かぶ巨大ながれきの「島々」である。こうした島には犠牲者が巻き込まれている可能性があるが、潜水士が捜索するには危険すぎた。幸いなことに、ROVががれきの下に潜るのは非常に容易である。また海上保安庁とのやりとりから、ロボットについての認識を高める必要があることが明確になった。海上保安庁も10年前にROVを使ったことがあるが、操縦が困難だったことや音波探査機を搭載していなかったことから、津波の発生時に活用することを考えなかったそうだ。私は思わずこう叫びそうになった。「10年も前のことですよ! ノートパソコンや携帯電話、自動車でさえ、この10年のうちにどれほど変化したことか!」その後、海上保安庁は日本国内の代理店を通じ、ROVの利用を始める手配をした。
IRSとCRASARのチームは4月24日に帰国したが、要請を受けて10月20日から27日まで南三陸町を再訪し、志津川湾全域で漁業に悪影響を及ぼす恐れのあるがれきの確認作業を手伝った。サーボット(SARbot)はわずか6時間のうちに水中8万平方キロメートルを探索し、撤去が必要な大きな物体を104個発見、全地球測位システム(GPS)の位置情報を確定した。また潜水士が手作業で捜索し、安全であると宣言されていた区域で、車を2台も発見した。こうした成果から、音波探知機がいかに役立つかが分かる。灯台が見つかり、航路を塞いでいたがれきの位置を確認できた。港長と漁業組合はこの結果をとても喜び、漁業活動維持のために町全体で活用するため、ROVの購入に関心を示した。ROVの価格は3万ドルから10万ドルなので、考え方としては、米国の農家がグループで高価なコンバインを購入し、収穫時に共有するのと似ているかもしれない。
私たちは災害対応・復興のためのロボットの人道的活用に加え、科学者がこうしたロボットの性能、センサー、インターフェースに改良を加え、インターネットを通じて世界のどこにいても誰でもより簡単にロボットを使えるようにするために役立つ教訓もたくさん学んだ。

サーボットが捕らえた水中に沈んだ車の画像(写真提供 Robin Murphy)
IRSと共に日本国民を支援できたことは光栄であった。振り返ってみると、外国の報道機関が、ダンスをするロボットはあるのに福島にはロボットがない、と日本を批判していた時に、ウェスティングハウス社はTホークを投入していたし、IRSはCRASARと協力した活動やクインスを福島で使用するための改良作業に忙しく、報道機関の批判に反論する時間がなかったのは皮肉なことである。IRSが10年にわたりレスキューロボット分野で指導力を発揮してきたことが報道機関から見過ごされ、あるいは無視されているのは残念なことだった。
NSFとJSTによる共同の資金拠出により可能になった長年にわたる国際的な連携、そして災害時に最先端の技術を輸入するため困難に立ち向かった両国の外交官の努力がなければ、前述の活動はどれも実現できなかった。これが前例となり、他の国も手続きの円滑化を考えるきっかけとなることを願っている。どの国も、災害への対応・復興に必要となる全ての技術やリソースを一国で持つことはできない。協力し合えば、命を救い、 被災地の被害や長期にわたる経済的な損害を軽減できる。
ロビン・マーフィー
テキサスA&M大学コンピューターサイエンス・エンジニアリング部のレイテオン社記念教授。IEEE研究員であり、ロボット支援探索救助センター(CRASAR)の所長も務める。ジョージア工科大学で博士号を取得。NSF、DARPA、海軍研究局(ONR)などの機関から資金提供を受け、人工知能およびレスキューロボットに関する人間とロボットとの相互作用を研究している。11件の災害での都市の捜索および救助活動において、地上、航空、海洋ロボットを出動させた功績から、競基弘賞(日本)、アルオーブ貢献賞(AUVSI)、およびイーグル賞(NIUSR)を受賞した。現在、国防科学委員会(DSB)およびコンピューティング・コミュニティー・コンソーシアムの委員を務めている。
COMMENTS0
LEAVE A COMMENT
TOP